什麼是 ToF?
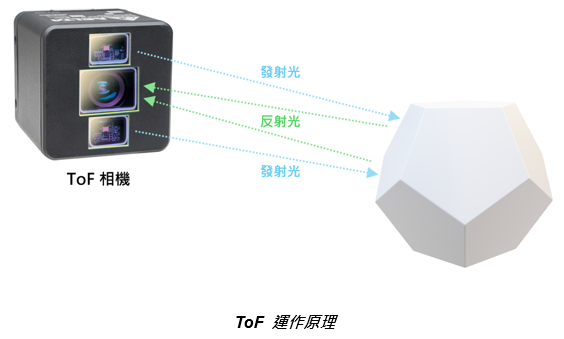
ToF(Time of Flight,飛時測距)是一種利用發射光線與接收反射光線來測量距離的技術。ToF 相機透過發射紅外光,並量測光線從發射、碰到物體後反射回來的時間差或光波相位差,來計算物體與 ToF 相機之間的距離。ToF特別適用於需要即時深度數據的應用,例如物體體積量測、棧板識別、機器人避障與導航等。
ToF 相機是如何運作的?
1. 發射光脈衝 / 調變光源
內建光源(紅外雷射 / LED)向目標物體發射光訊號
2. 光線反射回收
光線遇到物體表面後反射,經由相機鏡頭收集
3. 感測器記錄時間差 / 相位差
影像感測器偵測回收光訊號,記錄與發射端的時間差或相位差
4. 運算單元計算距離
依據記錄到的數據運算各像素點的距離,生成對應的 3D 深度圖
 ToF 有哪兩種類型?
ToF 有哪兩種類型?
根據測距原理與技術不同,ToF 技術主要分為兩種類型:
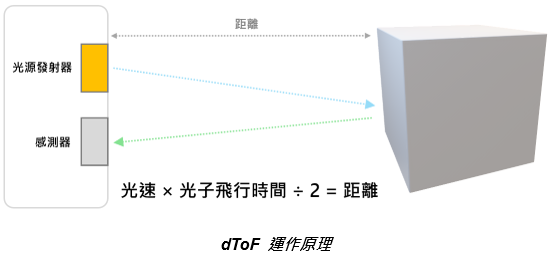
dToF(Direct ToF,脈衝測距)
dToF 是利用發射短脈衝光訊號進行測距的技術,原理是在極短的時間內,發射一束紅外光脈衝,當光線碰到物體表面後反射回來,透過感測器記錄從發射到接收的時間差,並以光速計算出物體與相機之間的距離。
由於 dToF 直接測量光的飛行時間,不像 iToF 需要判讀相位差,因此沒有最大無模糊距離的問題,適用於較長距離的量測。然而,要測量極短的奈秒等級時間差,對感測器的時間解析度與系統設計要求極高,通常需要專用的高速計時電路,且系統成本相對較高。
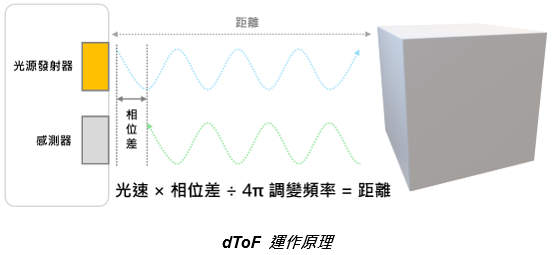
 iToF(Indirect ToF,連續波調變測距)
iToF(Indirect ToF,連續波調變測距)
iToF 是透過持續調變光源進行距離量測,主要透過調變紅外光的頻率或相位,持續發射亮度隨時間快速變化的光訊號,當光線碰到物體後反射回來,系統會偵測發射光波與接收光波之間的相位差,並依據這個相位差計算物體的距離。
與 dToF 相比,iToF 的光源不需要產生極短脈衝,因此系統架構較簡單、更容易實現,成本通常較低。然而,由於 iToF 是根據相位差計算距離,會存在最大無模糊量測距離的限制,一旦超過此距離,量測結果將重複週期,因此 iToF 最適合 10 公尺以內的短中距離應用。
 ToF 技術可以如何應用?
ToF 技術可以如何應用?
ToF 相機能提供即時、精確的 3D 深度資訊,常用於:
• 物體量測與定位
快速取得物體 3D 尺寸與位置,用於自動化檢測與包裝
• 棧板定位、尺寸測量、堆疊判斷
提升倉儲與物流的空間利用率,降低運輸成本
了解更多
• AGV / AMR 導航與避障
協助自動搬運車偵測障礙物與環境,實現安全自主移動
了解更多
• 機器人視覺感知與手臂抓取定位
將 ToF 與 RGB 影像融合,可強化機器人辨識包裹色彩、形狀、尺寸的能力,精準執行抓取、搬運包裹的任務
了解更多
台達 ToF 解決方案

 https://www.deltaww.com/zh-TW/products/3D-ToF-Camera/unmanned-forklift-pallet-picking
https://www.deltaww.com/zh-TW/products/3D-ToF-Camera/unmanned-forklift-pallet-picking