可以使用Accur (Mode) 指令,Mode【string】共有五種模式,以下分述?明,
- HIGH:到位精度最高,表示要越接近實際的目標點位,其整定時間較長。
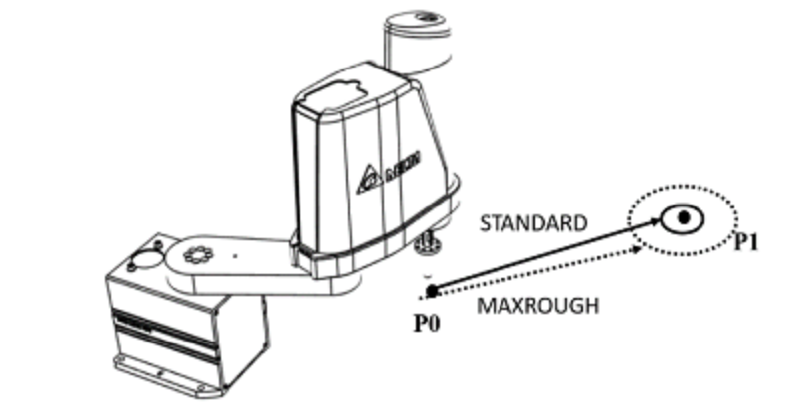
- STANDARD:到位精度標準,僅次於HIGH,整定時間短於HIGH。
- MEDIUM:到位精度一般,僅次於STANDARD,整定時間短於STANDARD。
- ROUGH:到位精度較低,精度較 MAXROUGH高,整定時間較STANDARD短。
- MAXROUGH:到位精度最低,其到達目標點位的整定時間是最短的,當動作較大且在運動過程中較不會受到外在干涉的情況下,可以將手臂的到位精度調整到最低,以提升動作效能。
RL程式設定範例說明 :
Accur("STANDARD") --設定到位精度標準
MovL("GL_P1")
MovL("GL_P2") --相較於 MAXROUGH,到達 GL_P2 的整定時間會比較長