How do I create the origin of a coordinate for a motor with an absolute encoder?
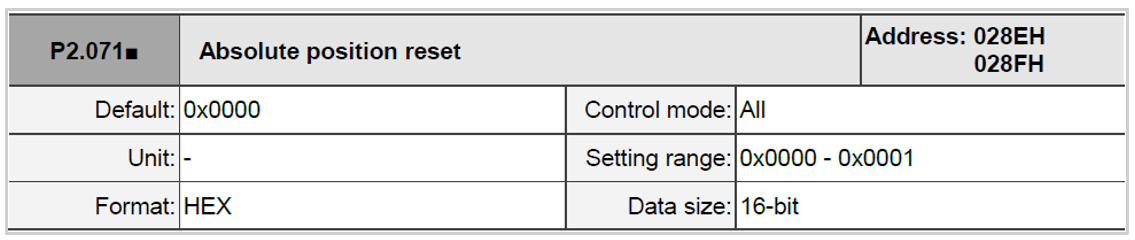
To set the absolute position of the encoder to zero, make sure the P2.069.X parameter is set to ‘1.’ Then set P2.008 to ‘271,’ and P2.071 to ‘1.’ The current absolute position of the encoder is then reset to zero.