PID control provides the controller with three parameters, P (Proportional Band), I (Integral Time), and D (Derivative Time).
1.P: Proportional Band
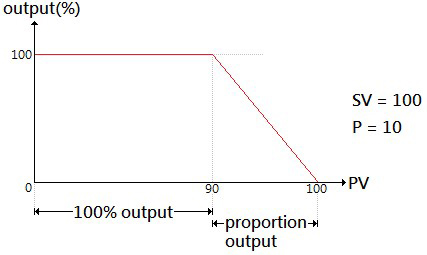
P indicates the proportional band over which a controller’s output is proportional to the error of the system. For example, for a heater, a temperature controller with a proportional band of 10 deg C and a set value of 100 deg C would have an output of 100% up to 90 deg C (100 – 10 deg C). When the temperature controller overshoots the set value of 90 deg C, the controller will adjust the output by percentage to reach a stable temperature as shown in the figure below:
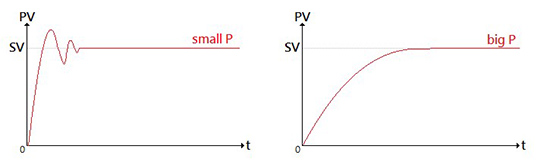
Therefore, if you choose a small P value, the time for 100% output may be much longer. The control action may be too small and may stabilize at a point above your desired temperature. In contrast, if you choose a large P value, it may result in a large proportional output and make the system unstable. The present value (PV) may require a very long time to reach the desired set point (SV). Please refer to the figures below.
2.I: Integral Time
I represents a time period (in seconds) over which the temperature is averaged (integrated). It is used to remove set point (SV) errors and correct for under/over shoots in temperature. The error is integrated over a period of time, multiplied by a constant I, and added to the proportional output. For example, when the I value is set to 20 and PV is lower/higher than SV, the temperature controller will increase/decrease by 1% output every 2 seconds. Similarly, if the I value is changed to 10, the temperature controller will increase/decrease by 1% output every 1 second.
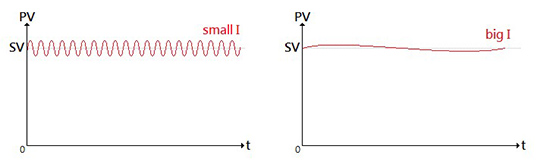
Therefore, if you choose a high I value, the temperature correction speed is fast and may cause large temperature fluctuations. However, if you choose a low I value, the temperature correction speed is slow. To reach a smooth temperature, the temperature errors need to be corrected over long periods of time. Please refer to the figures below.
3.D: Derivative Time
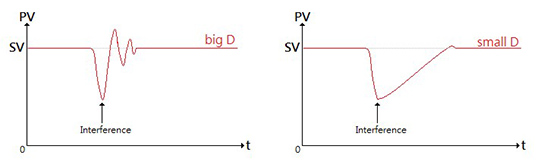
D indicates a shorter time period (in seconds) over which the temperature is averaged to determine the controller's response to a change or interference in the process temperature. The larger the derivative time, the more rapidly the controller will respond to the changes in the process value. For example, when the D value is set to 5 and the temperature starts to ascend/descend, the controller will rapidly increase/decrease by 5% output. Similarly, when the D value is changed to 20, the controller will rapidly increase/decrease by 20% output.
Therefore, when you choose a big D value, the response to a change or interference in temperature is also quicker, If the D value is too high, it may generate temperature fluctuations; and if the D value is too small, there will be a slower response.
Please refer to the figures below.